
こんにちは⛄
新年あけましておめでとうございます。
本年もどうぞよろしくお願いいたします。
3連休に宇治の方に用事があり、空いていたら…という条件付きで
世界文化遺産の平等院へ行ったところ、空いていたので拝観。
極楽浄土の世界を堪能してきました。
鳳翔館の中での幻想的な世界を見た後の売店にて…
雲中供養菩薩像に圧倒され、家でも見れるように写真集が欲しいと思ったら
おいてある…
実物の方がいいからやめとく!!と断腸の思いで購入はやめましたが、
平等院だけでなく、宇治は観光に向け、とても上手に商売をしてらっしゃるなーと
いつも感心します。
弊社もほしいと思われたものをそっと差し出して双方の欲を満たせる、
宇治の商売スタイルを見習って今年も一年頑張りたいと思います!!
☆3Dソリューション☆
新年あけましておめでとうございます。
3Dソリューションの業務では日本全国の現場に赴くのですが
昨年伺った現場では高速道路の中に信号があったりフェリーの部屋の中が
圏外で久しぶりにスマホから解放されたり様々なことがありました。
いろいろ驚くこともありますが、家に帰るまでが現場ですので道中も安全第一に行動しております。
さて今回はそういった現場で撮影したデータを利用しての配管のルート選定について紹介していきたいと思います。
前回は配管の接続部の現状把握に3Dスキャンが有用であるとお伝えしましたが、
3Dスキャンは周辺一帯の座標情報が取得できるので配管の位置関係がはっきりわかり
道中のルート選定にも3Dスキャンは非常に役立ちます。
点群の中に3Dで配管ルートを検討することで現地と図面が異なる場合や、
図面が無く、現地の状況を把握しないといけない場合などに
非常に有用です。
(既設配管回避)

(既設配管に沿うルーティング)
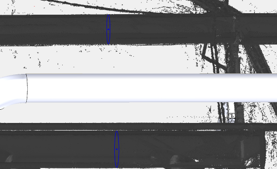
上記の画像のように既設回避するルートやサポートなどを共有するために、
既設を沿わせるルート検討など現状に即したルートを簡単に決めることができます。
この方法であれば図面化やモデリングと並行して新規計画を行うことができるので、
測定の翌日から設計検討を開始することが可能になり事前準備の時間の短縮が可能です。
3Dを使うのは敷居が高そう、事前のいろいろ用意するものが多そうなど
疑問がありましたらまずは一度弊社に問い合わせいただければと思います。
お客様の状況に即した最適なプランを提案いたします!!
次月のニュースについてですが引き続き配管検討でお伝えしたいこともあるのですが、
何回もこの場を占有してると他のニュースをお伝え出来ないので一旦配管検討はお休みして、
グラフィックについてのニュース紹介を行いたいと思います。
☆ソフト開発☆
現在Clearpointsにてウォークスルー機能の開発を進めています。
「点群をもっと気軽に利用して欲しい」から開発が始まったClearpointsにて
実際に点群内を歩いているかのように様々な角度から自動移動閲覧することができる機能です。
ウォークスルー機能は大きく視点移動と視点間移動の2種類用意しています。
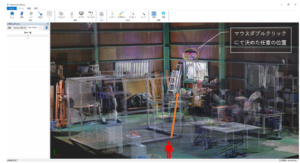
★視点移動
現在の視点から任意の視点までウォークスルー移動します。
任意の視点は、マウスダブルクリックで簡単に決められます。
また、任意の位置までは視点を固定したまま(視線位置をそのまま)の移動と
視点を任意の位置に向けて移動する2種類の方法があります
視点を固定したまま(視線位置をそのまま)の移動は
移動元と移動先の高低差に左右されず移動できます。
例えば、建造物が入り組んでいることにより任意の位置指定が困難なとき、
指定した位置に左右されず視線位置をそのままで移動できますので、
雑木林の向こうの建造物へ移動したいときなどに便利です。
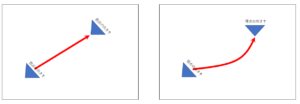
視点を任意の位置に向けて移動は
移動元と移動先の高低差を考慮した移動ができます。
例えば、坂道の移動や階段の移動などに便利です。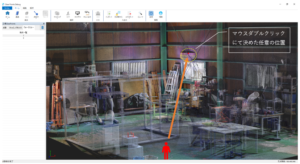
★視点間移動
予め視点を保存しておくことにより、指定した視点から視点へウォークスルー移動します。
予め移動したい経路が決まっているときに便利です。
視点の向きを考慮して移動します。
今後の開発機能のひとつとして、ウォークスルーや操作動画の出力機能も考えています。
☆機械設計☆
機械Gでは、先月の引き続き配管ロボの研究を進めております。
配管の中を調査と3Dプリンタで軽量化とコストを抑えたロボットを製作すること
を目的にしているものです。

前回からの進歩としては、小型のラズパイに変更しモデルの小型化を進められたとと、形状を三輪タイプのものだけでなく、2つに分けて電車の連結のように走れるロボットの開発も進めていることです。
まだ、研究段階のためCAD上のモデルのみになってしまいますが、完成イメージはこのようになる予定です。
また今後の研究として挙げていた各パーツの3Dプリンタでの造形については、故障時の交換などを想定して、基盤などのケースを造形し取り外しがしやすいようにできないかなど検討しております。
まだまだ配管内の方向転換や移動方法など課題は多いですが、引き続き研究を進めていきます。