
こんにちは🌞
今月は展示会情報があるため、早めのニュース送付となります。
2/16(木)17(金)
京都ビジネス交流フェアに出展いたします。
ご来場お待ちしております!!(事前登録必要です)
先日、壬生寺様の節分会へ行きました。
大護摩祈祷は見に行けなかったのですが、貫主様からYoutubeリンク頂戴しました。
夕方に壬生狂言を見に行くことができ、とてもおもしろかったです!!
ご縁を頂戴したことにより、世界が広がったこと、
コロナの自粛でお祭りに参加したのが久しぶりで感慨深かったこと、
思い出の残る節分になりました。
☆デジタルサービス(旧3Dソリューション)☆
3D製作フローのご紹介
弊社での3Dコンテンツ製作の一例を、
改めてフロー形式でご紹介したいと思います。
3Dでどういったものが作れるのか、そのためにどういう流れが必要なのか
わかりにくいイメージが少しでも晴れればと思います。
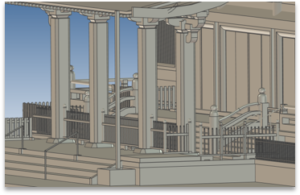
①現地スキャン

高精度3Dスキャナーと高精細画像で撮影します。
形状・大きさに合わせて様々な機種をご用意しております。
高所はドローンも併用して撮影します。
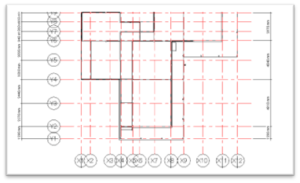
②スキャンデータを編集

3Dデータは膨大なデータ容量になります。
適切な状態へ軽量化を行います。
この時点でもデジタルツインとして活用いただけます。
続きを読む




☆ソフト開発&機械設計☆
位置把握及び位置制御へ向けての取り組み
ソフト開発チーム・機械設計チーム共同開発
(共同研究開発:京都工芸繊維大学様)
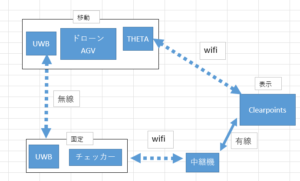
AGV(走行ロボ)やドローンの位置をUWB(超広帯域無線)の測距技術にて位置測位して、
点群ソフト’Clear points’や360度カメラソフト’SPOT360’で可視化するシステムの開発を行いました。
UWBを2つ使うことでUWB間の距離を取得。
それを利用して機体と基準となるチェッカーにそれぞれUWBを搭載し、基準点から機体がどのくらい移動したのかを可視化します。
Clear pointsとUWBをwifi接続することでリアルタイムで機体の現在位置を点群上に表示します。
AGVにTHETA(360度カメラ)を搭載し、wifi接続で任意のタイミングでTHETAの画像を取得することもできます。
また、Clear points上で点群上にどの場所で取得された画像なのかも記録されます。
続きを読む
京都府の産業支援のページにテストの様子を紹介していただきました!
https://www.pref.kyoto.jp/sangyo-sien/company/shrewd.html
今後の課題として、今回距離を取得していたのを3次元位置把握を行い機体の座標そのものを取得したいと考えています。
これにより、高低差なども反映できるようになります。
また、THETAの画像だけでなくライブ配信ができるように改良予定です。